
Podstawowym mechanizmem działania georadarów jest wysyłanie pojedynczych impulsów fal elekromagnetycznych [EM] (realizowane przez nadajnik) oraz odbieranie sygnałów odbitych (poprzez odbiornik). Każdy element znajdujący się w podłożu może spowodować odbicie fali EM jeżeli jego parametry elektryczne (stała dielektryczna i przewodność elektryczna) będą się różnić od otoczenia. Dla przykładu: łatwo jest znaleźć metalową rurę zakopaną w suchym piasku ponieważ różnica parametrów elektrycznych tych dwóch materiałów jest bardzo duża. Teoretycznie różnica jednej jednostki stałej dielektrycznej powinna dać odbicie fali. Z reguły jednak typowy grunt jest ośrodkiem skrajnie niejednorodnym dlatego często nie łatwo jest zlokalizować elementy o niewielkim kontraście elektrycznym. Ta sama reguła dotyczy struktur i warstw geologicznych. Fala przechodząc przez granicę dwóch ośrodków ulega częściowemu odbiciu jeżeli występuje między nimi różnica stałych dielektrycznych, np. łatwo będzie zlokalizować strop masywu skalnego pod warstwą gleby, ale trudniej będzie wyróżnić poszczególne warstwy (np. sedymentacyjne) samego masywu. Na tej samej zasadzie georadar jest w stanie wykryć pustki skalne, spękania czy jaskinie.
Zasadę działania georadaru prezentuje poniższy obrazek:
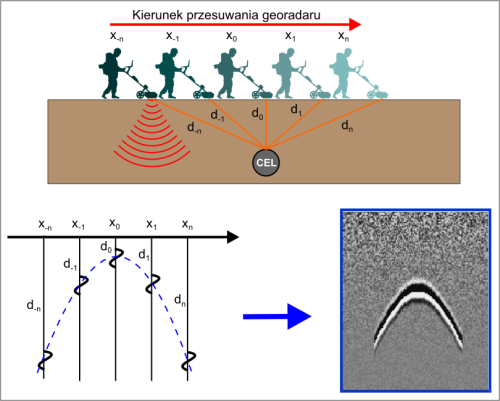
Każdy georadar składa się z kilku kluczowych elementów. Najważniejszym z nich jest jednostka sterująca, będąca "sercem" całego urządzenia. Podstawowe zadania jednostki to sterowanie pracą anten, odbieranie i przetwarzanie sygnału (z analogowego na cyfrowy) oraz współpraca z podłączonym komputerem pomiarowym.
Najważniejszym parametrem jednostki sterującej jest tzw. PRF, czyli częstotliwość powtarzania impulsów. Jest to wielkość, która decyduje o szybkości - a co za tym idzie także ilości wysyłanych impulsów elektromagnetycznych. Najszybsze jednostki sterujące mają PRF na poziomie około 400 kHz. Oznacza to, że jednostka jest w stanie wysłać 400 tysięcy pojedynczych impulsów na sekundę. To jednak nie wszystko, ważny jest także tzw. Współczynnik składania (stacking) - parametr, który prezentuje z ilu pojedynczych impulsów EM może być odtworzona jedna trasa georadarowa. Pojęcie trasy najlepiej wyjaśnić na przykładzie gotowego, przetworzone obrazu/profilu georadarowego.
Drugim elementem wchodzącym w skład konfiguracji georadarowej, szczególnie ważnym z punktu widzenia użytkownika jest antena. Anteny georadarowe to zazwyczaj mniejsze lub większe plastikowe "skrzynki", w których znajdują się odpowiednio przygotowane metalowe płytki zwane dipolami. Anteny różnią się między sobą przede wszystkim częstotliwością pracy. Różnice w częstotliwości pociągają za sobą także zmiany wymiarów anteny. Technicznie rzecz biorąc, częstotliwość anteny świadczy o fizycznych parametrach fali EM a to z kolei przekłada się na dokładność pomiaru i, co najważniejsze, głębokość penetracji. Zakres częstotliwości anten georadarowych znajduje się w przedziale od kilkunastu MHz to około 2000 MHz. Ogólnie rzecz biorąc im niższa częstotliwość tym większe wymiary anteny, większa głębokość penetracji ale mniejsza dokładność (rozdzielczość obrazu). Anteny o niskiej częstotliwości mają zazwyczaj duże rozmiary i pozwalają na głęboką penetrację ale z małą dokładnością. Ten typ nadaje się najlepiej w badaniach geologicznych, gdzie interesuje nas duża głębokość penetracji i poszukujemy dużych obiektów np. struktur geologicznych. Maksymalna osiągalna głębokość penetracji np. anteny 25 MHz w suchym podłożu piaszczystym lub skalnym to około 30 m. Teoretycznie w pewnych warunkach (np. na lodowcu) możliwe jest oczywiście osiągnięcie nawet większej głębokości, jednak z reguły w pospolitych warunkach glebowych jest to znacznie mniej. Anteny o najwyższych częstotliwościach pracy (około 2000 MHz) mają znacznie mniejsze rozmiary (mieszczą się zazwyczaj w dłoni) i pozwalają na bardzo dokładne badanie ale tylko na niewielkiej głębokości. Dlatego ten typ anten używany jest najczęściej w prześwietlaniu ścian i konstrukcji w celu lokalizowania np. zbrojeń, kabli czy ukrytych pustek. Głębokość penetracji np. anteny 2 GHz wynosi około 0,5 m. Anten wysokoczęstotliwościowych (1000 - 2000 MHz) używa się także w drogownictwie przy inwentaryzacji warstw drogowych (asfaltowych i podbudowy). Anteny o częstotliwościach pośrednich (100 - 1000 MHz) są najbardziej uniwersalne i wykorzystywane w powszechnych zastosowaniach - m.in. wykrywaniu infrastruktury podziemnej.
 |  |  |
Ważnym elementem konfiguracji georadarowej jest także komputer pomiarowy. Niektórzy producenci stosują własne wyświetlacze jednak najbardziej pospolitym jest wykorzystanie oddzielnego laptopa. Z poziomu komputera przy pomocy specjalnego oprogramowania tzw. rejestrującego, ustawiamy parametry zbierania danych, informacje o miejscu pracy a także kontrolujemy cały proces pomiaru. Ponadto na ekranie laptopa obserwujemy wstępne wyniki. Najważniejszą funkcją komputera pomiarowego jest jednak zapisywanie danych. Wyniki które widzimy na ekranie są już mniej lub bardziej przetworzone (poddane odpowiednim filtrom i algorytmom). Na dysku komputera gromadzone są dane surowe, które potem należy samodzielnie przetworzyć w celu uzyskania jak najlepszych wyników. W skład konfiguracji georadarowej wchodzi ponadto wiele innych elementów, które dla użytkownika nie są tak bardzo ważne ale bez ich obecności nie możliwe byłoby zbieranie danych. Oprócz oczywistych kabli i złączy są to m.in. koła pomiarowe - służące do pomiaru odległości poruszającego się i zbierającego dane radaru. Aby uzyskać jakikolwiek wynik georadar musi się poruszać, a wszystkie skany (trasy) muszą być dokładnie zorientowane w przestrzeni. Od parametrów koła pomiarowego zależy jak gęsto względem siebie będą na ekranie ułożone kolejne styczne trasy, a więc jaką ostatecznie otrzymamy rozdzielczość poziomą. Dlatego tak ważny jest pomiar odległości. Georadar może także współpracować z systemem GPS - wtedy oprócz pomiaru odległości otrzymamy też konkretne, bezwzględne współrzędne każdego skanu.
Cały proces zbierania danych to jednak tylko początek kompletnej analizy georadarowej ośrodka. Drugim etapem, często trwającym dłużej niż samo zbieranie danych, jest przetwarzanie i interpretacja wyników. Odbywa się to już nie na komputerze pomiarowym ale w biurze na komputerze wyposażonym w specjalistyczne, zaawansowane oprogramowanie do przetwarzania danych. Program ten, wykorzystując różne algorytmy: filtry i wzmocnienia, umożliwia oczyszczenie otrzymanej mapy radarowej (tzw. echogramu) z szumów i uwydatnienie interesujących nas obiektów. Tak przygotowane pojedyncze mapy radarowe możemy następnie złożyć w celu otrzymania mapy 2D lub 3D badanego terenu. Ponadto często mamy możliwość wrysowania na mapie interesujących nas obiektów lub przedmiotów np. warstw lub rur. Niektóre programy współpracują ze środowiskiem CAD i umożliwiają np. eksport zaznaczonych obiektów (rur, kabli) na podkład geodezyjny w programie AutoCAD. W przypadku badań geologicznych, kiedy interesują nas warstwy mamy możliwość otrzymania wygodnego raportu w postaci tabeli Excel.
 |  |  |